一、背景介绍
由于手在日常的人类活动中,起着至关重要的作用,估计完整的手的三维姿态越来越重要。在很多场景下,比如运动控制,人机交互,虚拟/增强现实,对手姿态的估计需要在一些混乱、有干扰的环境下进行。由于最近卷积神经网络的发展,目前静态、第三人称视角、在无干扰、无遮挡环境下对手部的追踪和手势估计已经很有效。但很明显,这种场景设定在一些实际场景中并不常见。
在现实世界场景下,经常需要从第一视角来进行手势追踪估计,而且背景往往杂乱无章,手经常在跟物体进行交互时存在遮挡,而需要交互的物体形状不定, 这就为手势估计和重建构成了很多具有挑战性的任务。总结而言,第一人称视角下,进行手势跟踪和估计具有如下一些挑战:
- 存在遮挡
- 背景杂乱无章(噪声)
- 第一人称视角带来的视野限制(因为相机往往放置在肩部,如图1)
- 手和物体的交互
- 该场景下,标注数据的缺失

图1,第一人称视角的手势跟踪
本文总结了近几年在第一人称手势估计方面的顶级工作。这些方法基本上都是基于卷积神经网络进行,利用已有的,或者自己采集的,真实的或者合成的数 据进行训练。一般针对与物体交互的场景进行,需要在有遮挡、杂乱无章的环境下进行。
二、手部姿势估计的一般过程
一般而言,第一人称视角下,手部姿势估计过程可以分成两步,手部定位和姿势估计。近几年,这两者基本上都可以通过卷积神经网络实现。
手部定位:通过训练好的,多层卷积神经网络,我们可以得到一个关于手部中心位置的置信度分布图,从而可以绘制成热力图的形式,如图2。

图2,卷积神经网络输出的热力图
姿势估计:对手部姿势估计,一般都会采用21手关节参数[^1]来估计整个手的姿态。通过手关节的角度,相对位置等信息,可以对整个手姿态进行一个重建,如图2 b。
三、带标注的训练数据的获取
一般而言,根据数据获取方式,可以分成三大类,(i)完全合成的数据,(ii)半合成数据以及(iii)真实数据。这些数据大部分是基于RGB-D相机获取的,也有搭配手部传感器进行采集。
1 完全合成数据
因为手动模拟手-物体的交互是一项耗时的任务,故而采用自动的,完全用计算机进行模拟的方法来合成数据。
Choi等人的工作[^2]中,提出了一种用模型进行拟合的方式,来优化模拟手对于模拟物体的抓握姿势的方法。该工作使用了粒子群优化方法(particle swarm optimization),对虚拟的三维手模型和被该手握住的模型的距离误差进行最小化。之后,作者通过碰撞检测技术来判断这个虚拟手部的抓取是否有效,从而排除无效的抓取。之后作者从模型中导出了相应的手的关节角度参数。最后作者将虚拟手部的深度图插入到杂乱无章的背景中,以模仿现实世界的真是噪音的存在。
2 半合成数据
为了在真实性和数据的多样性、易获取性上做出权衡,Mueller等人的工作[^3]则采用了半合成数据的方法,作者称为混合现实(merged reality)。如图3a所示,作者用一个无标记跟踪摄像头,用以从第三视角,跟踪一个无遮挡的真实手部,产生跟踪数据(这种方法已经很成熟),从而用以操作虚拟3D模型手来抓取虚拟的物体。通过这个方法可以增加数据的真实性。
这种方式的优点在于,既保留了一定的手部运动真实性,又能模拟出大量不同的虚拟手部(比如肤色的不同,手指长短,体毛浓密等等),与各种不同类型物体的交互以及各种不同的场景。

图3,a:混合现实(merged reality)方式获取手部数据,b:使用传感器和RGB-D相机 采集第一人称数据
3 真实数据
在Garcia-Hernando[^4]的工作中,采集了超过100,000个有3D手姿势注释的RGB-D帧,使用装在指尖上的六个磁性传感器进行数据采集,如图3b。其中包括45个类别,在3个场景中,与25个不同的物体进行交互。作者静心设计了不同的手部动作,以保证能覆盖较多的姿势,交互时间和运动状态。
四、手部定位方法(Localization)
因为卷积神经网络(CNN)方法的成熟,现如今,手部定位基本上都采用卷积神经网络来进行,Choi等人的工作,也证明了卷积神经网络相对于随机森林方法的优势[^1]。在经过训练好的深度神经网络的估计之后,一般会输出一张关于手部中心位置置信度的热力图。
比如,在Choi等人的工作中[^2],训练了一个带有六个卷积层,以及一个非线性判定层的卷积神经网络,用以判定输入图中的手心位置以及物体位置,如图4。

图4:由五层卷积层与一层非线性层构成的位置估计卷积网络
Mueller等人的工作[^2],在深度神经网络训练结果上,加入了后处理(post processing)过程,目的是增加数据的稳定性,因为手部中心位置不会随时间的变化而发生较大的变化)。作者保留了同一组数据,多帧图像的历史定位记录,并对每一帧图像的手部位置的定位结果做一个是否可信的判定。如果帧t的热力图的最大置信度小于0.1,且出现的位置和上一次最大值位置距离大于30,则认为其不可信,然后需要对这个最大值点进行更新:
$$\phi_t=\phi_{t-1}+\delta^k\frac{\phi_{c-1} - \phi_{c-2}}{||\phi_{c-1} - \phi_{c-2}||}$$
其中$\phi_t=\phi(H_R^t)$是帧$t$处的更新之后的最大值位置,是$\phi_{c-1}$上一个可置信(confident)的最大值位置,$k$是自上个可置信的最大值起经过的帧数,$\delta$是逐渐对不可信的最大值进行减权(downweight)的衰减因子。
经过更新,最大值位置不会随着时间变化而发生较剧烈的变化。
五、手势估计方法(Hand Pose Estimation)
目前有的手势估计方法基本上可以分成两类,基于分类的方法和基于回归的方法。
分类方法
Rogez等人在2014年发表的文章[^5]中,使用了分层量化的分类器。首先,需要构建一棵姿态类别树,每个节点都代表了一种姿态,层次越高的姿态,普遍性越高。而越接近叶节点,代表其手势的细节越多,更特殊,如图5所示。接下去,可以使用宽度优先搜索(BFS)来对输入的手势进行评估,对树的每一层,都可以剪掉那些评级为0的节点(也就是没有吻合性的姿态)。
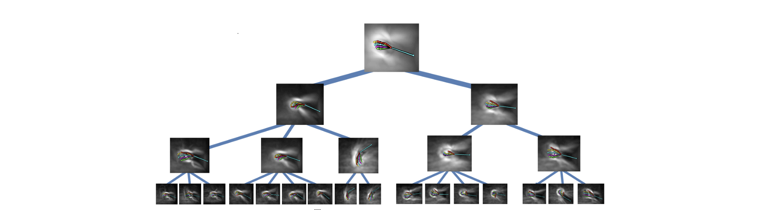
图5,手势层次量化分类器
Choi等人的工作[^2],用一个卷积神经网络,训练了一个分类器,已分类手部姿态,该工作的场景中,用户会抓取一个未知的物体。在训练分类器之前,作者认为,在追踪用户的手部姿态的时候,会因为传感器噪声等,导致输出的RGB-D图像存在一定缺失。故而在训练该分类器的同时,训练了输入数据再生成网络,通过自动编码器的方法实现输入数据复原。自动编码器由编码器(将高维数据映射到较低的维特征空间来降低输入的维数)和解码器(通过将学到的表示,映射回高维空间来恢复原始输入)构成,两者都是卷积神经网络,作者为两者都加入了四层隐含层,如图6a。之后,作者认为手的姿态和物体形状高度相关,所以在训练手部姿态分类器的同时,也加入了另一个神经网络作为物体形状的分类器,并共享这两者的决策层,来协作学习手和物体的成对的卷积特征,以增加分类准确性,如图6a。
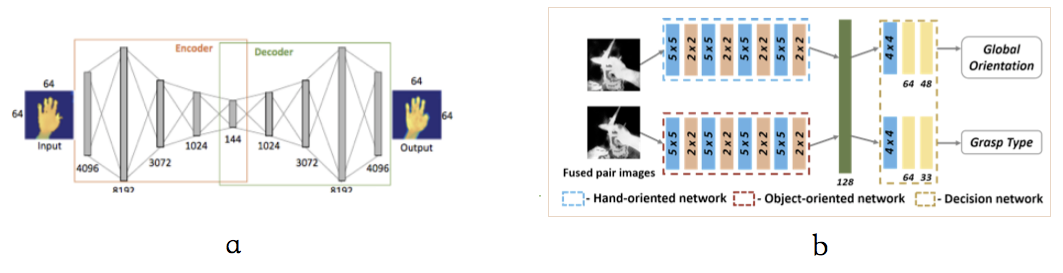
图6,a:RGB-D图 数据再生成网络,b:手势分类器神经网络的架构
回归方法
在Mueller[^3]等人的工作中,则是使用了卷积神经网络,对手部姿态向量进行了回归。作者采用了一个26自由度的手骨骼模型,其包括6个用于全局平移和旋转的角度,以及20个关节角度,存储在向量$\Theta$中,然后用一个卷积神经网络对这个向量进行了回归。Mueller等人在这个基础上,还加入了一些约束(比如关节旋转角度的范围,手关节运动速度等),以保证回归结果的有效性。
$$\mathcal{E}(\Theta) = E_{data}(\Theta,p_G,H)+E_{reg}(\Theta)$$
其中,$E_{data}$约束了相对位置,$E_{reg}$约束了关节旋转角度和运动速度。
[^1]: Choi, Chiho, et al. “A collaborative filtering approach to real-time hand pose estimation.” Proceedings of the IEEE International Conference on Computer Vision. 2015.
[^2]: Choi, Chiho, et al. “Robust hand pose estimation during the interaction with an unknown object.” Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. 2017.
[^3]: Mueller, Franziska, et al. “Real-time hand tracking under occlusion from an egocentric rgb-d sensor.” Proceedings of International Conference on Computer Vision (ICCV). Vol. 10. 2017.
[^4]: Garcia-Hernando, Guillermo, et al. “First-Person Hand Action Benchmark with RGB-D Videos and 3D Hand Pose Annotations.” arXiv preprint arXiv:1704.02463(2017).
[^5]: Rogez, Grégory, et al. “3d hand pose detection in egocentric rgb-d images.” Workshop at the European conference on computer vision. Springer, Cham, 2014.